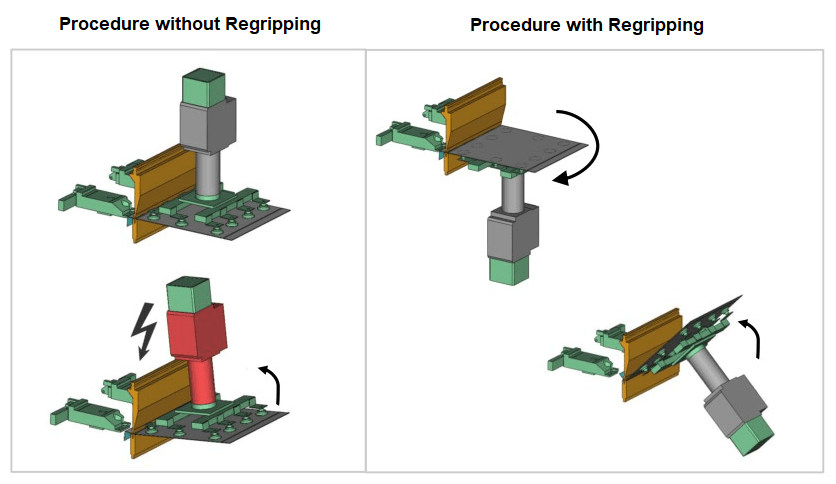
For the use of the regripping stations, an automatic proposal is calculated regarding their positions and their suction arms. If necessary, a manual adjustment can be made. The way in which the gripper holds the part might need to be changed between some bends. The robot gripper releases the part, moves to the new orientation and re-grips the part. During this time, the part can be secured by the regripping stations, or (if the part is small enough) clamped between the punch and die. Such a clamped regripping can happen before the bend (part clamped in flat position), or after the bend (part clamped in post-bend position). For example, the gripper might need to hold the part from the other side, or we might need to shift the grip position to avoid a collision with the machine table. This is done by a regrip operation.
We will further discuss the Regripping options used from the below topics
- Regrip Stations
- Methods of Regripping
- Clamp
- Clamp+Station
- During Bend
- Station
- Post Bend
- Adding Regrip
- Modify Re-Grip Positions
- Remove Regripping
- Regrip using Jaw Gripper/ Mechanical Gripper
- Gripper Panel & Suction Panel